
A couple of years ago, I reviewed JeVois-A33 computer vision camera powered by Allwinner A33 quad-core Cortex-A7 processor running Linux. The tiny camera would implement easy-to-use software for machine vision with features such as object detection, eye tracking, QR code and ArUco marker detection, and so on.
The camera could handle the tasks at hand, but since it relied on purely software computer vision, there were lag for some of the demo applications including 500ms for single object detection, and up to 3 seconds for YOLO test with multiple object types using deep learning algorithms. That’s a bit slow for robotics project, and software solutions usually consume more than hardware accelerated ones.
Since then, we’ve started to see low-cost SoC and hardware with dedicated hardware AI accelerators, and one of those is Kendryte K210 dual-core RISC-V processor with a built-in KPU Convolutional Neural Network (CNN) hardware accelerator and APU audio hardware accelerator found in Sipeed 1 module, Maixduino SBC, and other hardware platforms.
The guys at DFRobot decided to use the Kendryte processor to design an easy-to-use AI camera with an integrated display to perform computer vision tasks similar to the ones made possible with Jevois-A33 camera, but at much lower power consumption, and faster thanks to hardware acceleration. Meet Huskylens.

HuskyLens hardware specifications:
- SoC – Kendryte K210 dual-core 64-bit RISC-V processor @ 400 MHz with AI accelerators, built-in 6MB SRAM memory for CPU, and 2MB AI SRAM
- Storage – TBD, but there should be an SPI flash for the upgradable firmware
- Camera
- Standard version – 2.0MP camera based on OV2640 sensor
- Enhanced version – 5.0MP camera based on OV5640 sensor
- Display – 2.0 IPS screen with 320×240 resolutions
- Host Interface – 4-pin UART header (9,600 to 2,000,000 Mbps)
- Power Supply – 3.3 to 5.0V via 4-pin connector; 5V via micro USB port
- Power Consumption – 220mA @ 3.3V, 140mA @ 5V
- Dimensions – 52 x 44.5mm
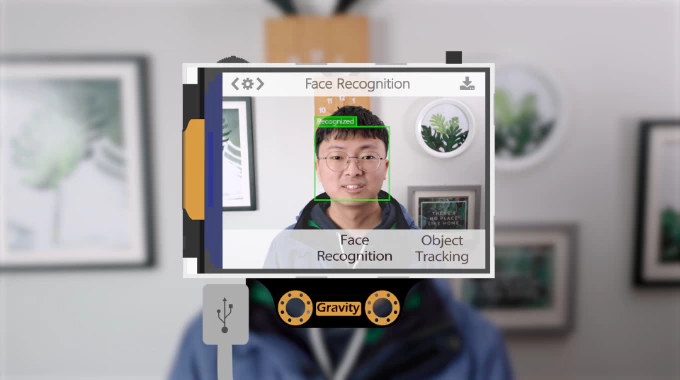 The board supports the following algorithms out of the box: object tracking, face recognition, object recognition, line following, color recognition, and tag recognition.
The board supports the following algorithms out of the box: object tracking, face recognition, object recognition, line following, color recognition, and tag recognition.
HuskyLens can learn new objects, faces, and colors through a single press, or a long press can start a continuous learning mode that enables it to learn the object or face from different angles and ranges. The more it learns, the more accurate it can be.
Performance-wise, the company explains the classic YOLO artificial intelligence algorithm only runs at 1~2 frames per second with the STMicro STM32H743, but the HuskyLens is 30 times faster. There aren’t many details about the software & firmware but it should rely on the same SDK as other Kendryte boards.
I understand the board can work in standalone mode for education purpose, but it also features a UART interface to connect to robots or other projects powered by development boards such as Arduino, LattePanda, Raspberry Pi and micro:bit, offloading the computer vision tasks. The video below shortly, but clearly showcases what the platform is capable of, and covers various use cases.
DFRobot launched HuskyLens on Kickstarter a few days ago with a 30,000 CAD goal (~$22,800 US), and they’re already funded. I’ll use US dollars going forward. All early bird rewards are gone, but you can still pledge for the 2MP “standard” version for $29.9, while the 5MP “enhanced” model goes for $59.9. If you want to do more than just experimenting with the platform, the tank robot kit featured in the video is also offered for $169. Shipping adds $5.3 to $19 depending on the rewards, and backers can expect their perks to ship around November or December 2019. Remember that’s a crowdfunding campaign, and delays happen often, so don’t assume you’ll necessarily get it before Christmas.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress



It’s exactly what I started to develop for my hexapod bot using OpenCV, but this one is much better and faster. Sadly years later Kickstarter is still at prehistoric age and still fills their databases with credit card numbers without accepting paypal. I’ll have to wait for the product to be finalized and sold 🙁
Maybe you don’t need to wait that long. I have a Maixduino kit also based on Kendryte K210, and with both camera and display like HuskyLens. I’ll work on it after I’m finished with Khadas VIM3.
Plz post a (detailed?) review about that maixduino kit. There are already very noticeable, odd and not surprising at all sipeed ‘idiosyncrasies’ resulting from the personality and values (or lack thereof) of “Cesar”/”zepan”… Still interested specifically in your take on it though.
Can you explain ? Was interested in the Sipeed version but now I’m curious
$30 to swap out the image sensor for one that costs about $3 more?
I guess bigger image sensor needs more processing power so it’s not only that to upgrade, isn’t it?
From their FAQ What’s the difference between Huskylens standard version and the enhanced version? The camera of Huskylens standard version is 2.0 megapixels, while it of enhanced one is 5.0 megapixels. Although HuskyLens only use the 320*240 resolution in algorithm, the quality of the enhanced camera image will be better so that the result of the enhanced version will be more accurate compared with the normal version. It also carries the autofocusing function which means the image will be clearer. This is friendlier with the algorithm. Also, the frame rate is three-times faster than the normal one. So it is… Read more »
> RK1808 based camera is a way better solution. Probably but for personal use, their kit seems to feature a working software stack out of the box, which is a great time saver compared to having to assemble everything by yourself and deal with OpenCV. My code currently acquires images, dispatches them through a pipeline running on several threads just to locate the presence of a face and let the bot decide to follow that face. The image processing part clearly isn’t the most interesting thing to work on (at least for me). This is why I find this kit… Read more »