
When embedded systems companies offer a system-on-module (SoM) and a baseboard, the later is usually open source hardware with all design files provided so that customers can leverage the work for their own baseboard, but files for the SoM are normally not released to customers.
Intel MAX 10 FPGA based Aries SpiderSoM and SpiderBase change that, as the company has decided to release both the module and carrier board KiCAD designs under a CERN OHL v1.2 license.
 SpiderSoM system-on-module specifications:
SpiderSoM system-on-module specifications:
- FPGA – Intel MAX 10 FPGA in F256 package from 10M04DC to 10M50DA
- System Memory – Optional 128/256/512MB DDR3 DRAM for 10M 16/25/40/50 FPGAs
- Storage – Optional 4 MB SPI NOR, optional 4 GB eMMC flash
- 230-pin MxM2 edge connector with 178x FPGA GPIO pins, including 13 LVDS transmitters and 54 receivers
- Misc – RTC with battery backup, programmable clock generator and PLL, with optional external reference input
- Power Supply
- Programmable high-efficient PMIC, FPGA IO voltages are configurable
- optional Li-Ion/Li-Pol charger
- Dimensions – 70mm x 35mm
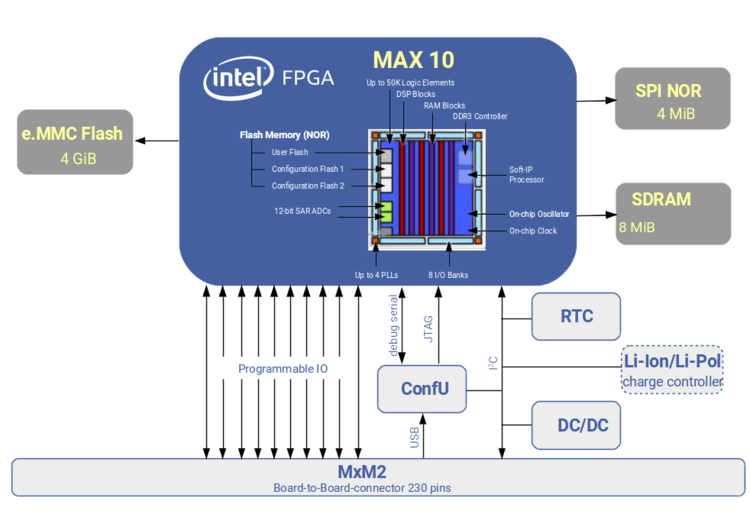 The block diagram above also shows a “ConfU” block for JTAG and serial debugging over USB that’s implemented through a Microchip PIC16F1454 microcontroller with the USB firmware made available on Github. The company provides support for Ubuntu 16.04 on the host side.
The block diagram above also shows a “ConfU” block for JTAG and serial debugging over USB that’s implemented through a Microchip PIC16F1454 microcontroller with the USB firmware made available on Github. The company provides support for Ubuntu 16.04 on the host side.
The SpiderSoM is a pin compatible low cost version of their MX10 SoM, and is designed for IoT maker applications instead of professional electronic designs for the MX10.
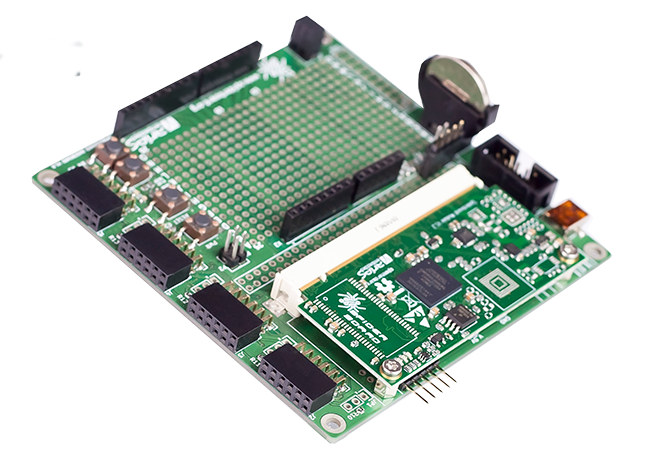 Both SpiderSom and MX10 modules can be fitted to the open source hardware SpiderBase pictured above, and with the following key features:
Both SpiderSom and MX10 modules can be fitted to the open source hardware SpiderBase pictured above, and with the following key features:
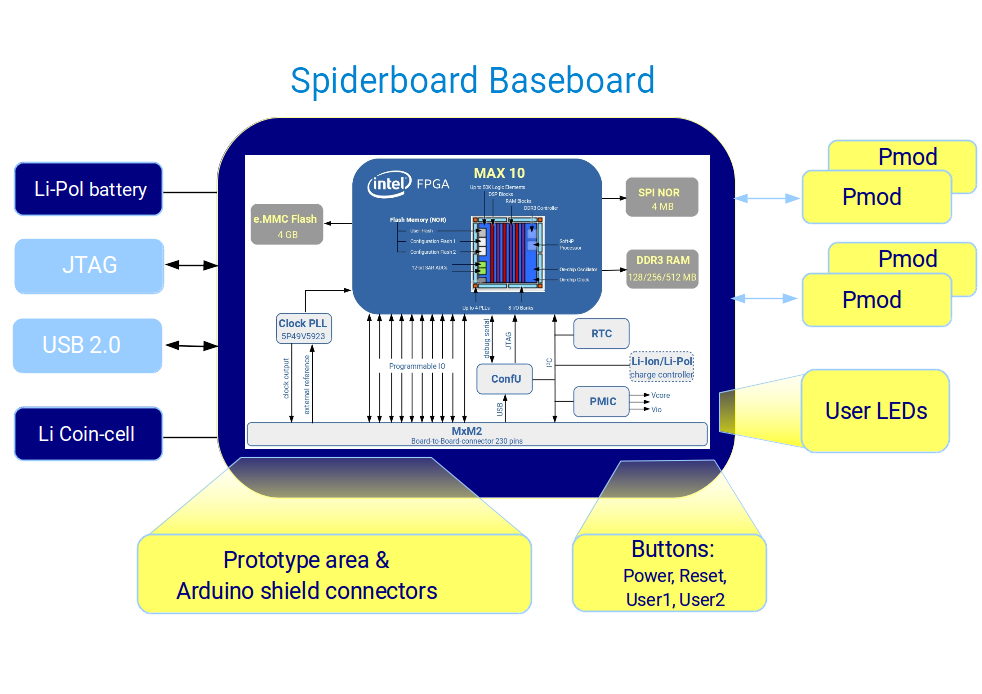
- MxM2 socket for SoMs
- USB – 1x USB mini B connector
- Expansion / I/O
- All I/Os from MxM2 connector are accessible through the pin headers
- Arduino shield compatible interface
- 4 Pmod compatible connectors (3.3V or 5V supply voltage selectable)
- 25×15 .1” prototyping area
- Debugging / Programming – Intel PSG Blaster compatible programming interfaces, JTAG
- Misc – 2x user push buttons, reset and power buttons, 2x user LEDs, CR2032 cell holder for RTC, configuration jumpers (e.g. boot selection for MX10 module)
- Power Supply – Via USB, or JST-2.0 lithium battery connector
- Dimensions – (2- layer design)
The solution can be used for various soft-core CPUs, video-processing algorithms, etc… You’ll find all resources for SpiderSoM and SpiderBase, including KiCAD and PDF schematics, PCB layout, BoM, and Gerber on the Wiki. I could not find details about the software side, and how to program the board from an Ubuntu 16.04 computer however. I did find various instructions on the web about installing Quartus Prime Lite on Ubuntu 16.04, so it might be the preferred tools for SpiderSoM too.
SpiderSoM can be purchased for 28 Euros and up, while the existing SpiderBase is also sold for 28 Euros and up depending on whether you want to include a SpiderSoM or MAX10 SoM in your order.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress



Quartus definitely sounds about right. Even though my knowledge about Intel FPGAs originates from the good old Altera times, back at the beginning of this millennium…
Yep, everything Altera is now Intel.
please add normal procesor with Linux.
arm risc motorola. no matter.
good for normal system and fpga