
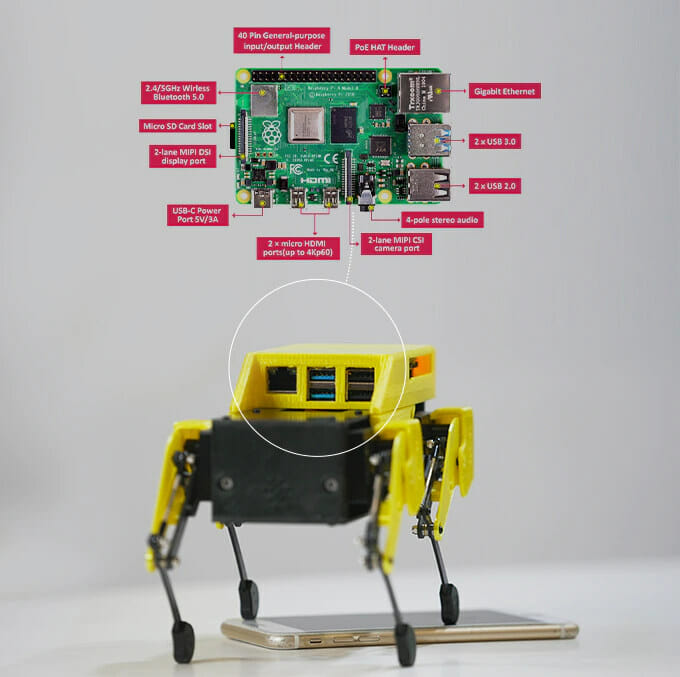
Mini Pupper is a Raspberry Pi 4 powered robot dog inspired by Stanford Pupper open-source quadruped robot, and designed in “light collaboration” with Nathan Kau, the original creator of Stanford Pupper.
Just like the original design, MangDang’s Mini Pupper is open-source, based on Ubuntu and ROS (Robot Operating System), and designed for robotics education in schools, homeschool families, enthusiasts and others, with notably students being able to learn out to use ROS, SLAM, navigation, and OpenCV computer vision through online courses that will come with the robot.

Mini Pupper key features and specifications:
- SBC – Raspberry Pi 4 Model B with 2GB RAM
- Storage – 2GB microSD card
- Display – 320×240 LCD for facial animation
- Camera – Support for OpenCV AI Kit Lite
- 12 DOF via MangDang’s custom servos
- Optional Lidar module for SLAM (Simultaneous localization and mapping)
- Battery – 800 mAh
- Charger – Input voltage – 100-240V AC 50/60Hz, output current: 3x 1,600mA ?
- Dimensions – Fits within a 209 x 109 x 165 mm volume
- Weight – 560 grams
The robot is available in various kits:
- Research Basic Kit – Only the custom parts from MangDang, and you’ll be expected to solder your own components, print the plastic parts with your own 3D printer, and use your own battery, charger, controller, Raspberry Pi, and microSD card.
- Research Kit – All you need to get started minus the controller, Raspberry Pi, microSD card.
- Complete kit – All the parts and tools to build and program the robot including Raspberry Pi 4B and microSD card.
- Full Mini Pupper – Same hardware as the complete kit, but fully assembled, and software pre-installed
The company also offers one optional accessory namely an LD06 Lidar module, and recommends OpenCV OAK-D Lite 3D camera, although a standard USB camera could do to get started without the depth function.
One fully assembled and configured, the dog-shaped quadruped robot that can hop, trot, and run around, finding its way around using SLAM, Navigation, and OpenCV AI functions. Mini Pupper’s software relies on a fork of ROS based Champ Quadrupedal Framework led by Juan Miguel Jimeno, which you can also find on Github. ROS2 support is also in the works.
MangDang promises to publish online courses about mechanical, hardware, ROS, SLAM, navigation, AI functions, and more, although there are few details about the courseware at this time.
The Mini Pupper open-source robot has raised over $300,000 US on Kickstarter so far with about 23 days to go. Most Super Early Bird rewards are gone, so pledges start at $279 for the Research Basic Kit, and you can still get the full-assembled Mini Pupper for $564. The retail price of the complete robot will be $940.
 The Lidar module adds an extra $139. Shipping is $25 worldwide, and the robot appears to be ready since deliveries are scheduled to start in November right after the campaign ends.
The Lidar module adds an extra $139. Shipping is $25 worldwide, and the robot appears to be ready since deliveries are scheduled to start in November right after the campaign ends.
Mini Pupper is not the first robot dog we’ve covered, and alternatives include Petoi Bittle (Arduino + Raspberry Pi) and XGO Mini Pro (Kendryte AI processor). Larger companies have also started to offer their own robots with, for instance, Xiaomi CyberDog and Amazon Astro, although the latter is more like a pet on wheels than a dog, and is designed for home monitoring, rather than education and/or reasearch.
Via Tom’s Hardware

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress



Don’t forget pippy, spotmicroai, and KiE which seems in libo 😐